
Véhicules intelligents
PACPUS : Perception et Assistance pour une Conduite Plus Sûre.
Présentation de la plateforme
La plateforme PACPUS est une plateforme de recherche technologique hébergée au sein de l’UMR Heudiasyc 7253 UTC/CNRS.
Il vise à intégrer les outils et ressources pour mener des recherches et expérimentations dans le domaine des véhicules intelligents. L’un des principaux objectifs de la plate-forme est de développer, intégrer et tester les fonctions ADAS (Advanced Driver Assistance Systems) et plus particulièrement dans le contexte des véhicules autonomes.
La plate-forme est composée de 6 véhicules expérimentaux, de moyens d’essais et de logiciels.
La plateforme est financée par les tutelles d’Heudiasyc :
et par plusieurs pouvoirs publics :
- la région Hauts-de-France et le FEDER (Fonds Européen de Développement Régional) ;
- les Projets européens ;
- les Projets R&D de l’Agence Nationale de la Recherche.
La plateforme est également ouverte aux collaborations industrielles directes.
Historique de la plateforme
Ce projet a été initié par :
- les Projets de recherche européens du PCRD (Prometheus 1991–1994, Roadsense 2001–2004) ;
- les projets nationaux du PREDIT (ARCOS 2001–2004, MobiVip 2004–2007, Sari 2005–2008) ;
- le programme CNRS ROBEA (Bodega 2003–2005) ;
- le GdR CNRS/INRETS CHMAC (Coopération Homme-Machine pour l’Aide à la Conduite automobile 1999–2001).
En 2005, la plate-forme a été identifiée par le CNRS comme plate-forme stratégique et a été accompagnée par l’organisme pour acquérir le banc d’essai CARMEN. CARMEN a été présenté aux symposiums IEEE IV2008 et IV2011 en tant que démonstrateur.
Véhicules
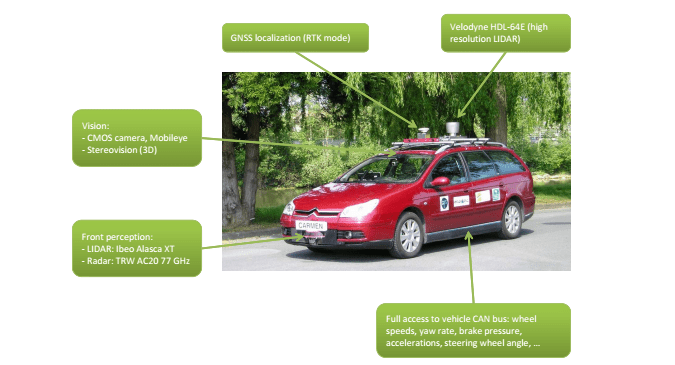
Carmen testbed
CARMEN is a Citroën C5 dedicated to the robotic perception. Several problematics are tested on the testbed : robust and reliable localization, local dynamic map, obstacles detection, exploitation of digital maps…
Carmen instrumentation
The experimental car Carmen has the following equipments :
- a Velodyne HDL-64E,
- a Novatel SPAN-CPT for the localization (RTK enabled),
- a front Lidar Ibeo Alasca XT,
- a front 77GHz TRW AC20,
- a Mobileye C2-270 (measurement of the safety distance, white lines and obstacles detection),
- several vision systems (stereovision, Infrared camera, TOF cameras),
- driver observation systems (FaceLab, SmartEye and SMI glasses),
- a full access to the CAN bus of the car.

DYNA – vehicle dynamics
DYNA is the testbed dedicated to the vehicle dynamics development. The car is equipped with the following sensors :
- 4 Kistler RoaDyn measuring wheels,
- a Corrsys Datron Correvit,
- a Crossbow IMU VG700AB,
- 4 Corrsys height sensors,
- a Ibeo LUX-8L front lidar,
- a realtime acquisition system (2kHz data acquisition),
- a embedded computer with data processing high capabilities.
Additionnal sensors like GPS receiver, cameras, … could be installed according to needs of the projet.
All the instrumentation of the car was done by the technical staff of the laboratory :
- the electrical power supply and the installation of the sensors was done locally,
- the lowlevel software uses a realtime Xenomai Linux to guarantee the synchronisation and the timestamping of the data,
- the highlevel software including the ADAS modules and the project applications use the PACPUS framework.

IRIS (IRIS is a Robotized Intelligent System)
IRIS is one of the autonomous car of the Heudiasyc laboratory. It was acquired in 2012 in the framework of the ROBOTEX project.

APAChE
APAChE (« véhicule Autonome Partenaire de Conduite ») are autonomous vehicles based on Zoé cars and are equipments of the ROBOTEX project.
APAChE, autonomous car and driving partner
The 2 APAChE cars are equipments of the ROBOTEX project and are fully controllable by computer. The embedded technology enables the ECUs of the laboratory to drive the car by wire. Especially a cooperative mode has been developped to transform the vehicle in a driving partner that would enforce your safety on the road.
The vehicles are equipped with a dedicated instrumentation to carry out real experiments :
- front and rear multi-layer lidars,
- 3 front 24 GHz radars,
- onboard cameras,
- GNSS localization systems,
- 802.11p radio modems for V2V and V2I communications.

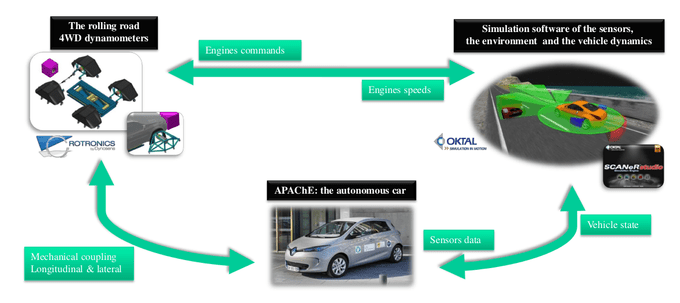
VILAD
« Vehicle In the Loop testbed for Autonomous Driving » is a 4WD hub to test robot cars. The 4 dynamometers will reproduce the road in acceleration and braking phases of the vehicle and an automotive simulator will provide the sensors data and the dynamics to the control algortihms.
VILAD, Vehicle In the Loop testbed for Autonomous Driving
The VIL testbed was designed to experiment repetable and faulty scenarii with autonomous cars. The environment and vehicle dynamics are simulated and the road grip is reproduced by a bi-directionnal 4WD testbed.
The complete electronic architecture of the vehicle and the robotics tasks are tested in real-time. As all of the inputs of the control algorithms are provided as in the reality, we can easily diagnose and improve the behavior of the robot before testing it on tracks.
Logiciel PACPUS
Le framework OpenSource PACPUS est accessible à cette adresse : https://devel.hds.utc.fr/software/pacpus
Application
Le projet européen VERVE, un premier résultat de conduite autonome avec un véhicule ROBOTEX.
La voiture APAChE a été utilisée pour effectuer des virages complets de la piste d’essai de SEVILLE au Centre d’innovation de l’UTC :
Plateforme avancée de mobilité urbaine UMAP par Renault
Les chercheurs d’Heudiasyc travaillent avec Renault pour construire une voiture sans conducteur. Le framework PACPUS est embarqué dans ce prototype pour alimenter les parties localisation et perception du système :