
SyRI (Robotic systems in interaction)
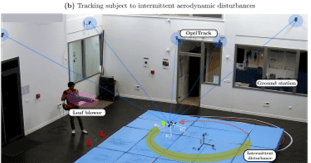
The SyRI team develops embedded systems that enhance the ability of mobile robots to act autonomously in complex open environments, in some cases in interaction with human operators, and in other cases in mutual interaction with other robots. SyRI’s flagship applications are mini-UAVs and autonomous vehicles.
Research topics
Control, Planning and Decision-making
This research axis aims to ensure the safe navigation of autonomous mobile robots in dynamic and uncertain environments, under constraints. It is structured around three main and complementary components addressing control, trajectory planning, and decision-making.
Perception, Data Fusion, and State Estimation
Data fusion methods for perception and localization must account for heterogeneous, asynchronous sensors producing imperfect data. Building on previous work, we investigate various uncertainty representation frameworks (probabilistic, evidential, and bounded-error approaches) to fuse heterogeneous information from multiple onboard sensors or digital maps.
Our main objective within this axis is to leverage data fusion to estimate system states for use in control architectures. This research area is structured around two complementary components:
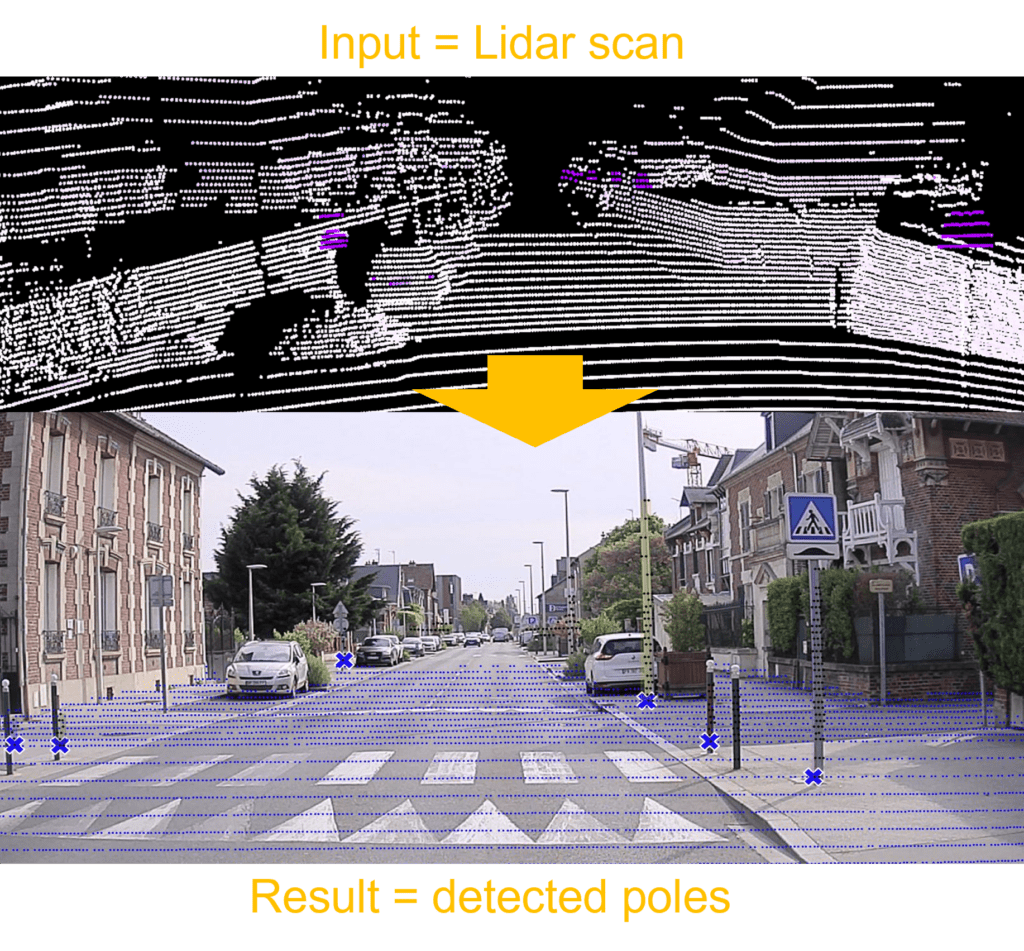
- Equipping systems with perception and scene understanding capabilities
- Data fusion for localization and state estimation
Robot cooperation and human-robot interaction
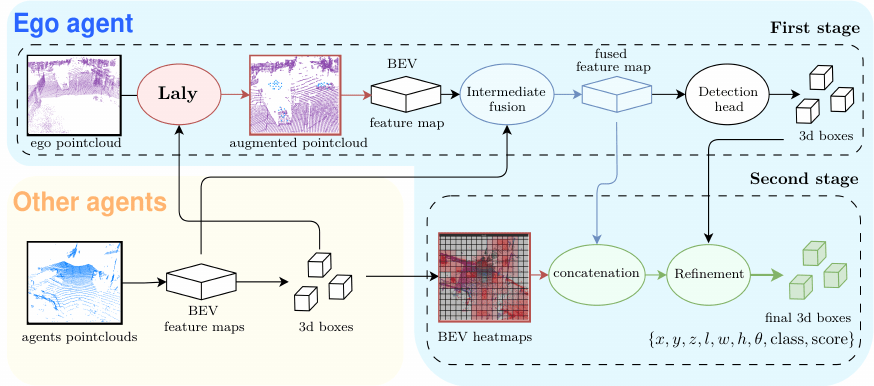
This axis focuses on cooperation between autonomous robotic systems and human interaction in complex environments. Research activities address collaborative perception, localization, control, and distributed decision-making for robot fleets, autonomous vehicles, and connected systems. They also investigate human behavior analysis and the design of context-aware multimodal interactions.
Team members
Projects
TIRREX : Technological Infrastructure for Robotics Research of Excellence
The Heudiasyc research laboratory at UTC is involved in the Future Investment Program, « Structuring Equipment for Research » (ESR) Equipex + TIRREX, led by the CNRS.
Objectives
TIRREX (Technological Infrastructure for Robotics Research of Excellence) is the result of several years of research and reflection in the field of robotics. It aims to develop new flagship robotics platforms with national coordination for their access and development.
The project brings together all major actors in French academic robotics research (CNRS, INRIA, CEA, INRAE) and is structured around 6 thematic axes and 3 transversal axes designed to support the thematic axes. Bringing openness to an unprecedented level in robotics, a third transversal axis will focus on open infrastructure.
It aims to ensure, standardize access, and maintain the openness of data, software, and publications produced (FAIR data and open-source software).
Research topics
Equipex+CONTINUUM (2021–2029) : Collaborative continuum from digital to human
The Heudiasyc research laboratory at UTC is involved in the Future Investment Program, Structuring Equipment for Research (ESR) Equipex + CONTINUUM, led by the CNRS.
CONTINUUM aims to create a collaborative research infrastructure of 30 platforms located throughout France to advance interdisciplinary research between computer science and the humanities and social sciences.
Objectives
Through CONTINUUM, 37 research teams will develop cutting-edge research focused on visualization, immersion, interaction, and collaboration, as well as on human perception, cognition, and behavior in virtual/augmented reality.
CONTINUUM enables a paradigm shift in our perception, interaction, and collaboration with complex digital data and digital worlds by placing the human being at the center of data processing flows.
The project provides scientists, engineers, and industrial users with a network of high-performance visualization and immersion platforms to observe, manipulate, understand, and share digital data, multi-scale simulations, and virtual or augmented experiences. All platforms will enable remote collaboration and will be equipped with mobile devices that can be loaned to users to facilitate access to these technologies.
Research topics
The CONTINUUM project revolves around 2 research axes:
- Interdisciplinary research on interaction, in collaboration between computer science and the humanities and social sciences, to increase knowledge and solutions in human-centered computing;
- Deployment of tools and services to meet the needs of various scientific domains in terms of access to big data, simulations, and virtual/augmented experiences (mathematics, physics, biology, engineering, computer science, medicine, psychology, education, history, archaeology, sociology, etc.).
RITMEA : Research and Innovation in Eco-responsible and Autonomous Transport and Mobility
The RITMEA project is a major research initiative aimed at reimagining the transport of tomorrow to make it safer, smarter, and more environmentally friendly. It is co-funded by the European Union through the ERDF (European Regional Development Fund) and by the Region via the 2021–2027 State-Region Plan Contract (CPER).
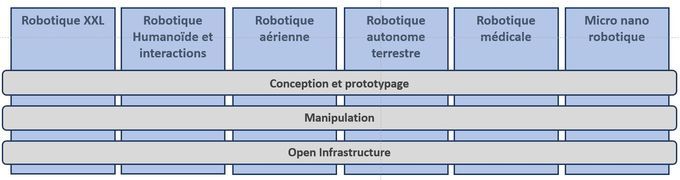
RITMEA is led by the Land Transport and Mobility Research Federation (FR TTM – CNRS 3733) and is structured around six scientific pillars covering key areas of future mobility (see Figure 1).
The University of Technology of Compiègne (UTC), through the Heudiasyc laboratory (UMR 7253 CNRS/UTC), plays a central role by coordinating pillars 3 and 5, which focus on vehicle automation and transport safety.
Priority Research Programs and Equipment
Participation in the PEPR programs Robotics, Iccare (cultural and creative industries), and Ensemble (digital collaboration).
More information : https://www.cnrs.fr/en/our-research/france-2030/pepr
CAP (Collaborative Acceleration Programs) Twinnings
TrustWorthy Interactive augmeNted autoNomous drivING : Shared driving of highly autonomous vehicles in collaboration with Renault.
ANR JCJC ToiCar 2022–2026
ToiCar : Towards Collaborative Integrity for improved autonomy of a multi-robot system
More information : https://toicar.hds.utc.fr/
ANR JCJC REVE-BNN
BNN (Binarized Neural Network) for Event-Based Robot Vision
ANR PRC INARI
vIsion multimodale pour une NAvigation et une commande Robuste de véhIcule autonome
ANR PRCE SUCCEN
Sustainable Constraints for future Cellular Networks
Selected publications 2025
CONTACTS
Head | Pedro Castillo
Tél : 03 44 23 46 17
Mail : pedro.castillo@hds.utc.fr
Deputy head | Reine Talj
Tél : 03 44 23 46 31
Mail : reine.talj@hds.utc.fr