
Robotic
UAV platform: Unmanned Aerial Vehicles.
Presentation
Heudiasyc’s aerial drone platform comprises several demonstrators, a software environment and experimental support. The objective is to provide tools and resources for experimental validation of research in automatic control and robotics. Activities include designing, modelling and controlling mini-UAVS, mainly multi-rotor.
The testbeds use mini-rotorcraft designed and built at the Heudiasyc lab, including 8‑rotor UAVs from the Equipex Robotex project and 4‑rotor UAVs from Parrot, both compatible with the testbed framework.
The platform is funded by Heudiasyc’s two supervisory institutions:
- CNRS ;
- Université de Technologie de Compiègne ;
and by several public authorities:
- Hauts-de-France region;
- The French National Research Agency’s Investments for the Future (PIA) program;
- FUI (Unique Interministerial Funding) projects.
Timeline
Heudiasyc researchers began working on aerial vehicles in 1997, and in the early 2000s they were seen as French pioneers in this field. From the start they were concerned with the design and control of mini-UAVs (Unmanned Aerial Vehicles), their field of expertise being automatic control and robotics. The team is interested in different aerial configurations including multi-rotors, airplanes, and convertible drones that are capable of vertical take-off and landing as well as forward flight like planes.
This was initially funded from:
- Regional projects;
- Mini-drone challenge competitions, co-organized by ONERA and DGA (2003–2005 and 2007–2009).
In 2011, the EQUIPEX Robotex project (as part of the Investments for the Future Program (PIA) by the French National Research Agency (ANR)) started supporting this research by providing equipment for the platforms.
Demonstrators
MODUL-AIR

- Eight-rotor aerial vehicles allowing advanced tests for research
- Modular structure which can integrate high quality sensors (Lidar, RTK GPS, HD cameras, etc.)
- Fault tolerant applications (redundancy of actuators), vision applications (automatic monitoring of lines, stabilization by Optical Flow)
- 1.1 Kg payload
Mini UAV fleet

- Four-rotor prototypes
- Inter-UAV communication
- Robust, aggressive control
- Fault tolerant applications (without redundancy of actuators)
- Flight formation and inter-fleet cooperation
- Embedded multisensory perception
- Trajectory generation and tracking
- Human-robot interaction
X‑AIR

- Eight-rotor aerial vehicle with passive inflatable protection, with no rigid structure between the motors
- Safe contact with humans and objects
- Similar to MODUL-AIR technology (see above)
- Patented drone configuration
Hydro-lift

- Large lifting capacity
- High autonomy, using hydraulic technology
- Project linked to an industrial research chair specializing in hydraulic technology
- Close collaboration between the Roberval and Heudiasyc labs
Experimental support
Flight testing arenas
- Indoor 10m x 12m x 6m flight arena equipped with motion capture (24 cameras, 1mm precision) and a monitoring room
- Outdoor 18m x 36m x 7m flight arena, fully enclosed, near a GPS RTK base
Workshops
- Mobile laboratory equipped with a GPS RTK base
- Mechanical, electronics and embedded computing workshops



FL-AIR

The FL-AIR (Framework Libre Air) was developed by Heudiasyc platform staff. Its main goal is to facilitate the implementation, tuning and testing of the algorithms developed. This framework is based on Linux and is compatible with Xenomai (real-time features); it manages all communications and real-time layers. To make monitoring of system states during experiments easier, a ground station is built automatically.
In addition, a simulator based on FL-AIR was also developed to safely test and analyze the performance of the algorithms developed before real flights. Possible bugs and errors can thus be detected and rectified. A 3D environment (see figure below) allows all embedded sensors (cameras, Lidars, etc.) to be emulated.
FL-AIR is open source and is protected by the Inter Digital Deposit Number: IDDN.FR.001.490010.000.R.P.2015.000.20600.
FL-AIR can be downloaded from: https://devel.hds.utc.fr/software/flair
CUSCUS
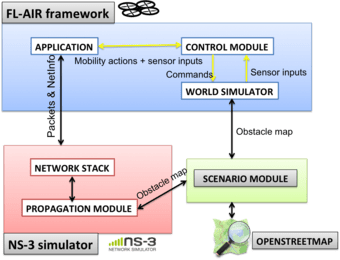
The current merging of networking and control research fields within the scope of robotic applications is creating fascinating research and development opportunities. However, the tools for a proper and easy management of experiments still lag behind.
We fill such gap in the literature by proposing a novel simulation.
Framework for controlling networked system, called CommUnicationS-Control distribUted Simulator (CUSCUS). Differently from the state of the art, CUSCUS allows simulating both the /UAV networking and flight control/, via the integration of two existing.
Tools: the Framework Libre AIR (FL-AIR) simulator and the mainstream network simulator [NS‑3]. CUSCUS also includes a scenario module for easy loading of scenarios directly out of OpenStreetMap.
Front-end (Under Construction at UTC GitLab)
Back-End (available at UTC GitLab): https://gitlab.utc.fr/zemanico/CUSCUS
CONTACTS
Responsable scientifique | Pedro Castillo Garcia
Tél : 03 44 23 46 17
Mail : pedro.castillo@hds.utc.fr
Responsable technique | Guillaume Sanahuja
Tél : 03 44 23 79 35
Mail : guillaume.sanahuja@hds.utc.fr