
Immersive simulation
Overview
TRANSLIFE is an immersive virtual reality room used for research on informed interaction. It is a four-faced CAVE™ (Cave Automated Virtual Environment), which can also be transformed into a more open three-faced installation.

TRANSLIFE was co-funded by the European Regional Development Fund (ERDF) 2014–2010, and by the Hauts-de-France administrative region. It became fully operational in March 2017.
There are two alternative configurations:
Mode 1
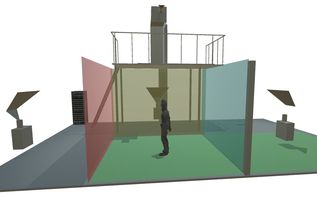
- 4 faces (U‑shaped)
- 3 glass screens (3.4m x 2.5m)
- Painted floor (3.4m x 3.4m)
Mode 2
- 3 faces (L‑shaped)
- 2 glass screens (3.4m x 2.5m + 6.8m x 2.5m)
- Painted floor (7.0m x 3.4m)
Caracteristics
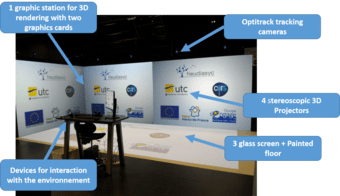
- 4 Projecteurs 3D Christie Mirage 1920x1200
- HP Z840 avec 2 Nvidia M5000
- 20 x Volfoni RF lunettes stéréoscopiques actives
- 10 caméras Optitrack autour du CAVE
- Wand PS Move, Leap Motion, Razer Hydra
- 5.1 surround
Headsets

- HTC Vive, Oculus rift (DK1 and DK2)
Mini MIXT

A côté de TRANSLIFE, la salle Mini-MIXT est l’autre plateforme de réalité virtuelle. C’est la version miniature de l’ancienne plateforme MIXT qui a laissé sa place à TRANSLIFE.
Caractéristiques :
- Projecteur Optoma 3D 1080p
- 5 cameras Optitrack Prime 13
- PC avec Intel Xeon X5650 et Quadro 5000
- Lunettes stéréoscopiques 3D Nvidia et Volfoni RF
TransONE is a suite of software tools that we use to adapt Unity3D applications for use on the TRANSLIFE platform and to develop new VR applications. TransONE includes various modules that concern different parts of the system:
- CAVE: for managing the display and peripheral devices (such as the Wand and HTC Vive)
- Mocap: for monitoring movement
- Feedback: feedback library (visuals, sound, etc.)
- Gestures: gesture library (including acquisition and management)
CONTACTS
Responsable scientifique | Indira Thouvenin
Tél : 03 44 23 45 47
Mail : indira.thouvenin@utc.fr
Responsable technique | Yohan Bouvet
Tél : 03 44 23 79 93
Mail : yohan.bouvet@hds.utc.fr
Overview
Heudiasyc has installed three platforms devoted to rail applications, to assist its research on dependability and analysis of the human factor:
- a rail supervision simulator
- a train operation simulator compliant with the European ERTMS/ECMS signalling norms
- a autonomous train simulator for software development
The team’s research centres around the analysis of human factors (supervisor and train operator behaviour). PhD candidates make use of the platforms to further their various research projects, some in relation to the human factor and human-machine relations.
The autonomous train simulator is dedicated to research work linking operational safety and on-board artificial intelligence, in partnership with the IRT Railenium as part of the Autonomous Freight Train project.
Training in simulator use is offered to rail professionals pursuing a vocational master’s degree. In addition, Heudiasyc’s rail supervision platforms receive numerous visits from industry and academia, by people eager to learn more about this valuable resource.
The platform is thus used for both research and education. The simulators can be used to validate scenarios that have been identified in theory by dependability analyses of sociotechnical systems.
Parent institutions
Our partners
- Hauts-de-Franc administrative region
- European Union (FEDER)
- IFSTTAR (Institut Français des Sciences et Technologies des Transports, de l’Aménagement et des Réseaux) which possesses the same ERTMS/ETCS simulator as ours. The two simulators can be connected for cooperative simulations in supervision tests involving a number of distributed PCCs and RBCs.
- LAMIH (Laboratoire d’Automatique, de Mécanique et d’Informatique Industrielles et Humaines – Université de Valenciennes et du Hainaut-Cambrésis): joint research projects (PhD theses).
- Hitachi Rail STS: international market leader in rail signalling and integrated systems for passenger and freight transport. Hitachi STS supplied our rail supervision simulator and plays an active teaching role in our rapid transit and rail master’s degree.
- ENPC (Ecole Nationale des Ponts et Chaussées): partner and coordinator of the advanced Master in Railway and Urban Transport System Eninnering.
- IRT Railenium : Technological institute of railway research, partner in various research projects (theses) and industrial projects.
ERTMS train operation simulator

The system comprises a scenario control station and four driver stations, two of which have dual 3D displays. It is rare for any research laboratory or university to have more than one or two driver stations. Consequently, the Heudiasyc simulator, which allows up to four train operators to simultaneously take part in a scenario, is among the most significant academic rail simulators in Europe.
Human-machine interface simulator

The ERTMS/ETCS system is compliant with Baseline 2 of the European Commission’s ERTMS/ETCS norm. The simulator reproduces ECTS (European Train Control System) cabin signal displays on a DMI (Display Machine Interface), just as they would be displayed in an ERTMS-equipped train.
ETCS system
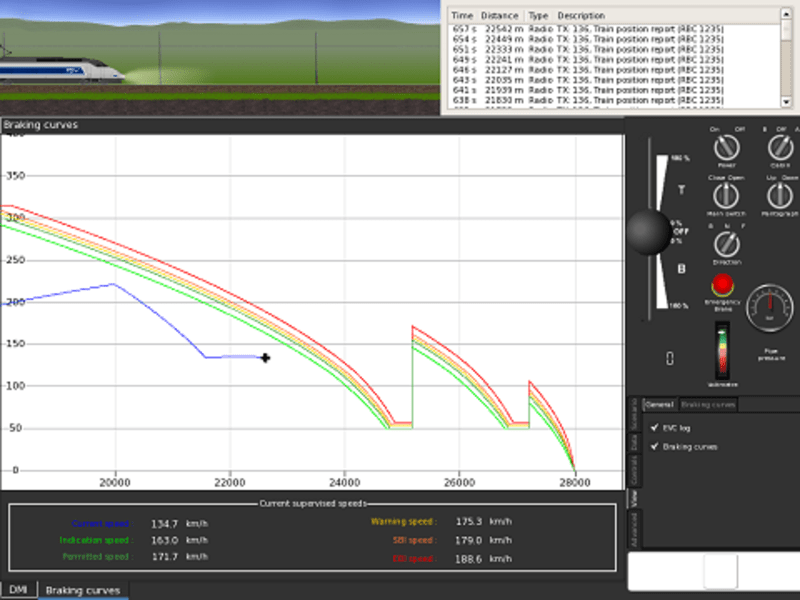
The simulator’s ETCS system has a module for displaying speed profile curves, meaning that changes in speed computed for a given authorized movement can be visualized graphically. It is also possible to visualize RBC logs. (Real ETCSs do not offer these displays.)
Scenario control station
The scenario control station is used for:
- creating track layouts for scenarios
- defining series of events constituting scenarios
- supervising the movement of trains as scenarios are played out
Track layouts for scenarios are completely configurable with respect to their characteristics (length, track type, number of parallel tracks, bends, speed profiles, electrification, types of light signals, side panels, etc.) and to their environment (number of stations, type of environment (rural, urban, forest, etc.)). Likewise, the characteristics of trains featuring in scenarios are configurable (weight, acceleration, braking, inertia, length, electrification, etc.). Scenarios may be played out entirely manually (supervision, reservation of cantons, movement authorizations, train operation), or automatically (whether totally or partially). In the case of automatic scenarios, a timetable is required.
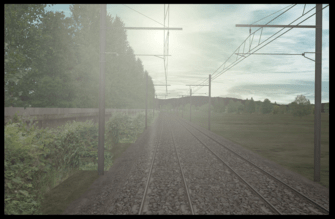
3D rendering

To obtain the most realistic simulation possible, the platform is equipped with two stations capable of rendering scenes in 3D. As scenarios play out, these two stations display the view from the cabin of one of the trains involved. An independent view that can be piloted using a keyboard is also available.
Rail supervision simulator

The rail supervision simulator, or RCCS (Route Control Centre System) was developed by Ansaldo STS. It is a faithful reproduction of the rail control centre at Ashford in south east England that supervises rail traffic on the High Speed One line between London St Pancras and Eurotunnel.

The simulator comprises five workstations:
- a simulation control station
- two signaller (or switching) interfaces
- a supervisor interface
- a maintenance interface
These stations are all linked to a virtual machine that emulates the server in operation at Ashford.
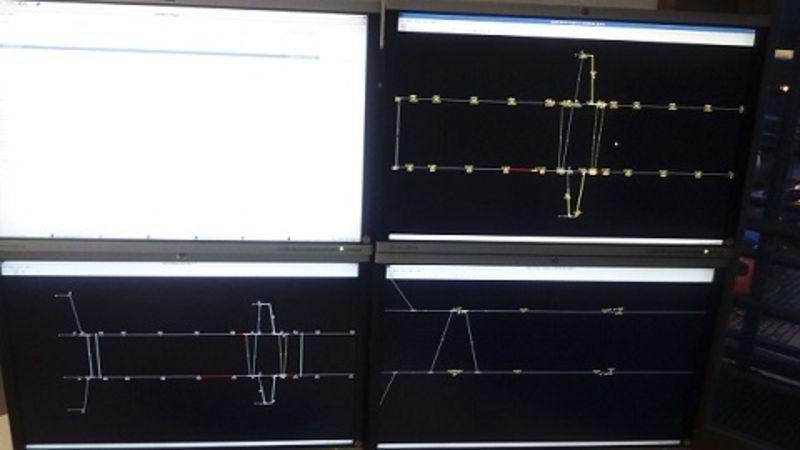
Signaller stations
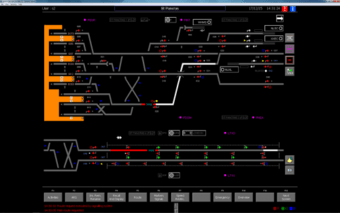
The two signaller stations present a detailed view of all the events on the line. The signallers control the itineraries reserved for individual trains and the position of each one, as well as all the track, signals, points, occupation of platforms, etc. The reservation of itineraries is managed automatically by the ARS (Automatic Route Setting) system, according to train schedules (times, types, stops, etc.), but the operators can intervene manually at any moment.
Supervisor interface
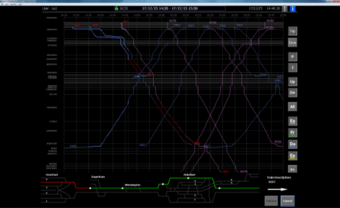
The supervisor interface (or timetable) offers a complete picture of rail traffic, both spatially and temporally. The graphic displayed is generated in relation to the day of operation. The factor that makes managing this line particularly complex is that it is used by both high-speed Eurostars (pink lines) and slower suburban trains (blue lines). Train itineraries may be displayed and quickly modified via this interface, all modifications being transmitted to the ARS system.
Maintener interface
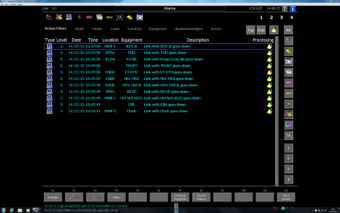
The maintener interface displays all alerts relating to the operation of equipment and of the system, such as failures of points or signals, failures to communicate with trains, etc.
Autonomous freight train simulator

The laboratory was equipped with an autonomous freight train simulator in spring 2019 to work on Autonomous Freight Train project in partnership with IRT Railenium. This equipment is part of the CPER program, funded by the region Hauts-de-France and FEDER. The simulator is an Oktal Sydac realisation. It is, to our knowledge, the first one in Europe.

The simulator is made with a training train driving simulator, used by SNCF drivers, to guarantee the signalling conformity and the on-board equipment functioning. The simulation software is modified to integrate the essential elements for the development of an ATO (Automatic Train Operation) and allow this third-party application to interact with the train and its environment.
The driver’s console and command systems

The control panel faithfully reproduces the train controls by combining physical controls and virtual controls on two touch screens. Additional customisable buttons allow interactions with the third-party application (ATO). Therefore, the simulated train can be driven manually, partially in autonomous mode (using ADAS) or fully in autonomous mode. It is equipped with KVB, TVM and ERTMS / ETCS (levels 1 and 2) on board signalling systems, as well as standard security systems: RSO, DAAT, SAL and SAR.
Simulation scripting

The simulator is fully configurable. The railways are editable to respond to all scenarios. Ground signalling system complies with French standards and includes most of the elements of mechanical, fixed and light signalling. A 3D objects library allows railways creation, that helps us to test the train in many kinds of environments.
The event management system allows different types of situations and hazards to be generated:
- Weather change (clear, cloudy, rainy, snow, mist, fog)
- Evolution of the scenario at various times of the day (day and night over 24 hours)
- Appearance of a 3D object on the track (obstacles: rock, car, pedestrians, animals, reclining tree, etc.)
- Signal failures
- Anomalies on the convoy
- On-board equipment failure
CONTACTS
Responsable scientifique | Mohamed Sallak
Tél : 03 44 23 49 30
Mail : mohamed.sallak@hds.utc.fr
Responsable technique | Yohan Bouvet
Tél : 03 44 23 79 93
Mail : yohan.bouvet@hds.utc.fr