
Simulation immersive
Présentation
Le laboratoire Heudiasyc dispose d’une salle immersive de réalité virtuelle dédiée à la recherche dans le domaine des interactions informées. Ce CAVE™ (Cave Automated Virtual Environment) à quatre faces est une salle immersive cubique qui peut être ouverte pour devenir un cave à 3 faces.


Cette plateforme a été cofinancée par le Fonds européen de développement économique et régional (FEDER) 2014–2020 et par la région Hauts-de-France. L’installation s’est terminée en mars 2017.
La plateforme a deux configurations :
Premier mode
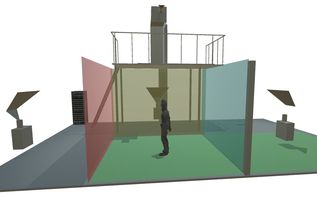
Deuxième mode
Caractéristiques
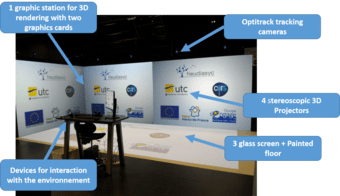
- 4 Projecteurs 3D Christie Mirage 1920x1200
- HP Z840 avec 2 Nvidia M5000
- 20 x Volfoni RF lunettes stéréoscopiques actives
- 10 caméras Optitrack autour du CAVE
- Wand PS Move, Leap Motion, Razer Hydra
- 5.1 surround
Casques

- HTC Vive, HTC Vive pro 2, Meta Quest 2
- Equipex+ Continuum (2021–2029) : 37 équipes de recherche développent des recherches de pointe axées sur la visualisation, l’immersion, l’interaction et la collaboration, ainsi que sur la perception, la cognition et le comportement humains en réalité virtuelle/augmentée.
- ANR MATCH (2022–2026) : Modulations multisensorielles et affectives du toucher : interaction et intentionnalité. L’objectif est de comprendre la sensation d’être touché par un agent autonome incarné.
- SOCIALTOUCH (2017–2022) : Comprendre, concevoir et évaluer la modalité tactile dans les interactions homme-machine sociales.
- Pilotage de drones : Pilotage d’un drone réel à distance grâce à une métaphore complexe manipulée dans un environnement virtuel.
- KIVA (2014–2017 FEDER et région Picardie) : KIVA est un environnement virtuel de formation au geste technique. Ce projet, réalisé en partenariat entre l’UTC (laboratoire Heudiasyc), Reviatech et Montupet, vise à former un futur opérateur de Montupet à l’exécution de séquences de gestes techniques relatives à différents postes de travail. Un modèle d’apprentissage statistique identifie le geste effectué par l’utilisateur en temps réel et mesure la qualité du geste par rapport à des gestes experts (niveau d’expertise, erreurs commises). Un modèle de décision propose ensuite un retour approprié pour l’utilisateur en se basant sur les résultats du modèle d’apprentissage, et des connaissances sur l’apprenant au moyen d’une métaphore adaptative.
- Chaire Surfaces intelligentes pour le véhicule du futur : Utilisation de la réalité augmentée pour la reprise en main d’un véhicule semi-autonome.
- LEON (2017- 2020, région Picardie) : LEON est un projet porte par le laboratoire de psychologie de l’UPJV visant à évaluer l’impact de la formation en environnement virtuel par immersion dans un CAVE comparativement à l’immersion dans un casque.
- ISIR UMR CNRS : Projets ANR Social Touch & ANR Match.
- Reviatech : Projet région KIVA
- ESAD Amiens
- Costech
- BMBI : Expérimentation de conduite de nuit pour une thèse portant sur l’endormissement au volant.


- Saint-Gobain : Chaire surfaces intelligentes
- Summer school – réalité virtuelle et création artistique digitale : la plateforme reçoit sur 2 semaines des étudiants venant de l’international pour une summer school axée sur la réalité virtuelle au service de la création artistique.
La plateforme est également utilisée pour l’enseignement dans différentes UV.
RV01 / AI38 (apprentissage) : Développement d’application de réalité virtuelle
Les objectifs de l’UV sont de familiariser les étudiants avec les concepts de l’informatique graphique, d’optimisation 3D temps réel, de réalité augmentée, et d’interfaces sensori-motrices. L’apprentissage de la programmation de scripts d’interaction est réalisé à l’aide d’un moteur 3D (Unity). Les étudiants doivent également interfacer leur projet avec les systèmes de réalité virtuelle de la salle immersive et de présenter quelques techniques d’interaction 3D. L’UV dispose d’une chaine Youtube dédiée permettant de présenter tous les projets étudiants réalisés au fil des années sur la plateforme de simulation immersive : UV RV01 de l’UTC
Le niveau niveau atteint par les étudiants qui suivent l’UV se concrétise par les trophées Laval virtual ou le contest IEEE 3DUI :
- “NEBULAE”, M. Mewen, A. Neveu, F. Jeanne, Virtual Fantasy – Demos – Laval Virtual 2017
- “Revell”, T. Delalande, A. Delval, F. Jeanne, Virtual Fantasy – Demos – Laval Virtual 2016
- “Wonderland Builder”, C.Barot &al, 2nd prize, 3DUI IEEE Contest, Orlando, USA 2013 avec une publication (C. Barot et al., “The Wonderland Builder: Using storytelling to guide dream-like interaction,” 2013 IEEE Symposium on 3D User Interfaces (3DUI), Orlando, FL, 2013, pp. 201–202.)
ICX06 :Interaction et systèmes complexes
Cette UE est destinée à des étudiants en design, ergonomie et informatique qui souhaitent concevoir des interactions innovantes. Le cours est centré sur les modalités d’interaction, leurs formes et les interfaces innovantes en environnement numérique de façon large. Il comporte un aspect méthodologique d’évaluation de l’interaction et une mise en œuvre de cette évaluation sur des projets communs avec des étudiants ingénieurs.
- Livre « Metavers : où en sommes-nous aujourd’hui ? » EPSILON DAY – Publicis Février 2022
- Plusieurs articles sont parus dans le journal Interaction UTC :
- Dossier « L’intéraction entre le monde réel et le monde virtuel » – N°55 Juin 2021« Le laboratoire Heudiasyc et le cockpit multisensoriel » – N°59 Février 2023« L’UTC au cœur de la réalité virtuelle » – Article web
- Article web : « Immersion dans la réalité virtuelle »
CONTACTS
Responsable scientifique | Indira Thouvenin
Tél : 03 44 23 45 47
Mail : indira.thouvenin@utc.fr
Responsable technique | Yohan Bouvet
Tél : 03 44 23 79 93
Mail : yohan.bouvet@hds.utc.fr
Présentation de la plateforme
Pour contribuer à son développement, le laboratoire HEUDIASYC accueille trois plateformes dédiées aux applications ferroviaires dans le cadre d’études et de projets de recherches sur la sûreté de fonctionnement et l’analyse du facteur humain :
- un simulateur d’un poste de supervision de trafic ferroviaire ;
- un simulateur de conduite sous signalisation normalisée européenne ERTMS/ETCS ;
- un simulateur de développement de train autonome.
Les projets de recherche sont effectués par les membres de l’équipe autour de l’analyse des facteurs humains (comportement des superviseurs ou contrôleurs, et des conducteurs). Les plateformes servent de supports aux doctorants dans le cadre de thèses portant également sur le facteur humain et la relation Homme/machine.
Le simulateur de train autonome est dédié aux travaux de recherche liant sureté de fonctionnement et intelligence artificielle embarquée, en partenariat avec l’IRT Railenium dans le cadre du projet Train Fret Autonome.
La formation sur simulateurs est dédiée aux professionnels en formation continue dans le cadre du mastère spécialisé Systèmes de Transports Ferroviaires et Urbains en partenariat avec l’ENPC et les différents acteurs industriels du monde ferroviaire. De plus, vu l’importance de nos plateformes, les simulateurs servent de démonstrateurs pour les nombreuses visites d’industriels et d’institutionnels.
La plateforme est donc utilisée pour la recherche, ainsi que pour l’enseignement, en permettant la validation sur simulateurs de scénarios identifiés de manière théorique par les approches intégrées d’analyse en sûreté de fonctionnement de systèmes sociotechniques.
Nos tutelles :
Nos partenaires
- Région Hauts-de-France
- Union Européenne (FEDER)
- IFSTTAR (Institut Français des Sciences et Technologies des Transports, de l’Aménagement et des Réseaux) : L’IFSTTAR possède le même simulateur ERTMS/ETCS que notre plateforme. Les deux simulateurs sont connectables et peuvent jouer des simulations en coopérations pour des tests de supervision comprenant plusieurs PCC et des RBC réparties.
- LAMIH (Laboratoire d’Automatique, de Mécanique et d’Informatique Industrielles et Humaines – Université de Valenciennes et du Hainaut-Cambrésis) : Partenariat de projets de recherche (Thèses)
- Hitachi Rail STS : Leader internationnal de la signalisation ferroviaire et de systèmes intégrés pour le transport de passager et le fret ferroviaire. Hitachi STS est le fabricant de notre simulateur de supervision ferroviaire et est un partenaire actif dans les cours du mastère en transport urbain et ferroviaire.
- ENPC (Ecole Nationale des Ponts et Chaussées) : partenaire et coordinateur du mastère spécialisé Systèmes de Transports Ferroviaire et Urbains.
- IRT Railenium : Institut Technologique de la recherche ferroviaire, partenaire dans différents projets de recherches (thèses) et projets industriels.
Le simulateur de conduite ERTMS

La possibilité d’avoir jusqu’à quatre conducteurs simultanément dans un même scénario fait de ce simulateur est un des plus importants d’Europe au niveau académique. La plupart des laboratoires de recherche et des universités ne disposent généralement que d’un ou deux postes de conduites.
Interface Homme-Machine (DMI)

Le système ERTMS/ETCS est conçu en respect de la baseline 2 de la Commission européenne ERTMS/ETCS. Le simulateur permet de reproduire les affichages de signalisation en cabine issus de l’ETCS (European Train Control System) sur un DMI (Display Machine Interface) tel que cela se produit dans un train réel équipé ERTMS.
Système ETCS
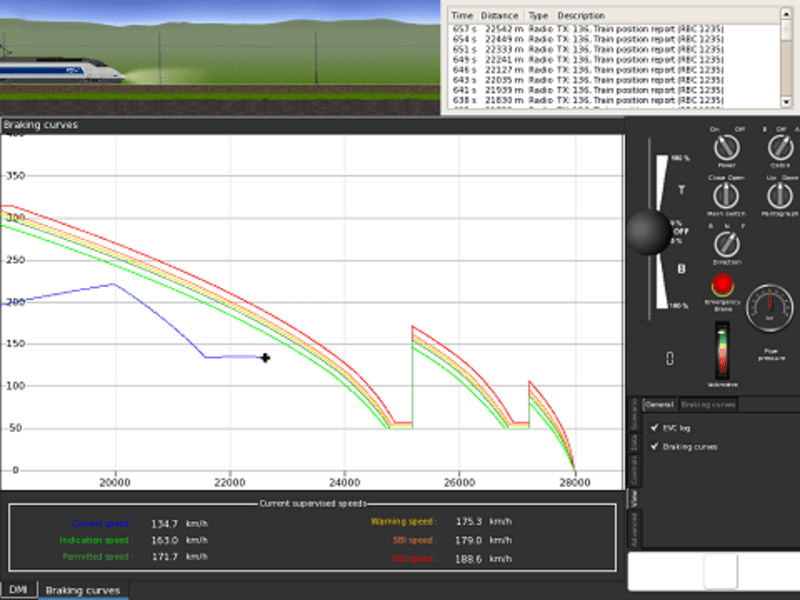
Le système ETCS du simulateur comporte un module d’affichage des courbes du profil de vitesses de la ligne qui permet de voir graphiquement les changements de vitesse calculés pour une autorisation de mouvement donnée. Il est également possible d’afficher les logs des transmissions RBC. (Ces affichages n’existent pas sur les ETCS réels.)
Poste préparateur
Le poste du préparateur permet :
- de créer les plans de voies sur lesquels les trains vont circuler,
- de définir les événements successifs qui vont composer les scénarios,
- de superviser la circulation des trains lors du déroulement de scénarios.
Les plans de voies des scénarios sont configurables à volonté, tant dans leurs caractéristiques (longueur, type de voie, nombre de voies parallèles, profiles de courbes, profiles de vitesses, électrification, types de signaux lumineux, panneaux latéraux, etc.) que dans leur environnement (nombre de gares, environnement d’évolution (campagne, ville, foret, etc.)). Il en va de même avec les trains qu’il est possible de simuler. Le système permet de configurer les caractéristiques de chaque train (poids, accélération, freinage, inertie, longueur, électrification supportée, etc.). Les scénarios peuvent être joués de façon entièrement manuelle (supervision, réservation des cantons, autorisations de mouvement, conduite des trains), ou totalement (ou partiellement) automatique. Dans le cas de scénarios en conduite automatique, il est à prévoir d’établir des tables horaires pour que la circulation des trains soit effective.
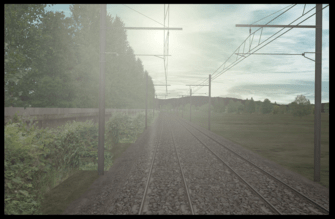
Rendu 3D

Afin d’obtenir un rendu de simulation le plus fidèle possible à la réalité, la plateforme est équipée de deux postes dédiés aux rendus de scènes en 3D. Lors de l’exécution des scénarios, ces deux postes affichent une vue depuis la cabine d’un des trains en circulation. Une vue libre, dirigeable au clavier est également possible.
Supervision de trafic ferroviaire

Le simulateur de supervision de trafic ferroviaire, ou RCCS (Route Control Centre System), est développé par la société Hitachi STS (ex-Ansaldo STS). Ce système est une reproduction fidèle du centre de supervision d’Ashford, où se trouve la salle de régulation de la ligne « High Speed One » en Angleterre (LGV reliant Londres-Saint-Pancras à Eurotunnel).

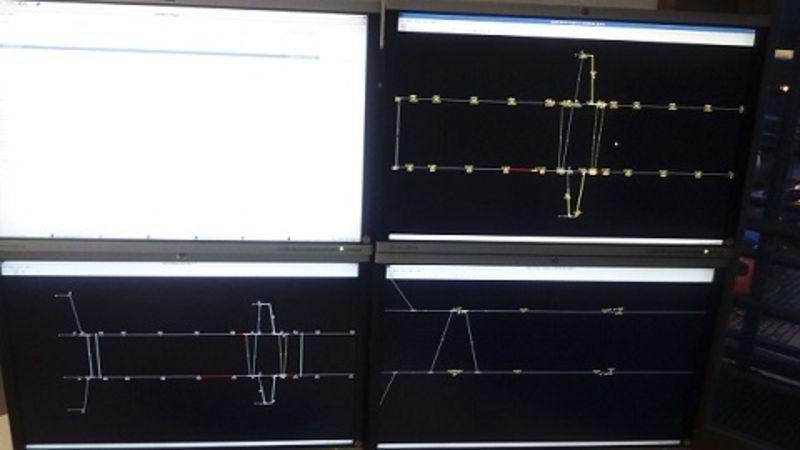
Postes de signaleurs
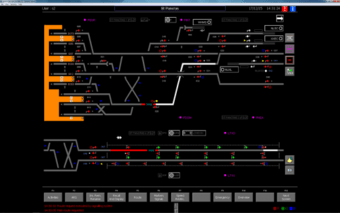
Les deux postes de signaleurs permettent une visualisation rapide et précise de tous les évènements de la ligne. Les signaleurs ont le contrôle des itinéraires réservés par les trains ainsi que la position exacte de ces derniers, l’ensemble des équipements sols de la ligne, les signaux et les aiguilles ainsi que leur état ou position, l’occupation des quais, etc. La réservation des itinéraires est automatiquement gérée par le système ARS (Automatic Route Setting) en fonction des la programmation des trains (horaire, type, arrêts, etc.), mais les opérateurs peuvent intervenir à tout moment en mode manuel.
Interface du superviseur
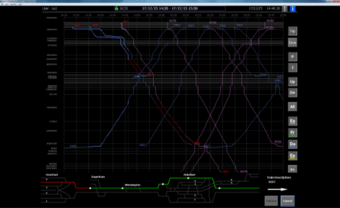
L’interface du superviseur (ou table horaire) permet de visualiser l’ensemble du trafic ferroviaire dans l’espace et le temps. Le graphique représenté est généré en fonction de la programmation de la journée d’exploitation. La difficulté de cette ligne réside dans le fait que les TGV Eurostar (courbes roses) évoluent sur les mêmes voies que les trains de banlieue (courbes bleues), beaucoup plus lents. Cette interface permet également de visualiser ou de modifier très rapidement l’itinéraire d’un train. La modification sera ensuite prise en compte par l’ARS.
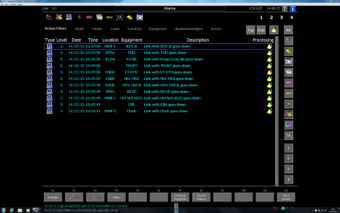
Interface du mainteneur
Le simulateur de train fret autonome

Dans le cadre du projet Train Fret Autonome, en partenariat avec l’IRT Railenium, le laboratoire s’est équipé d’un simulateur de train autonome au printemps 2019. Cet équipement fait partie du programme CPER, financé par la région Hauts-de-France et le FEDER. Le simulateur est une réalisation d’Oktal Sydac, du groupe Sogéclair et il est, à notre connaissance, le premier du genre en Europe.

Le simulateur est basé sur un modèle destiné à l’apprentissage de la conduite de train pour les conducteurs SNCF pour garantir la conformité de la signalisation et le fonctionnement des équipements de bord. Le logiciel de simulation est modifié pour intégrer les éléments essentiels au développement d’un ATO (Automatic Train Operation) et permettre cette application tierce d’interagir avec le train et son environnement.

Le pupitre de conduite et ses systèmes

Le pupitre de conduite reproduit fidèlement les commandes d’une motrice ferroviaire en mêlant des commandes physiques et des commandes virtuelles sur deux écrans tactiles. Des boutons bistables additionnels configurables permettent d’interagir avec l’application tierce (ATO). De ce fait, le train simulé peut être conduit manuellement, partiellement autonome (utilisation d’ADAS) ou pleinement autonome. Il est équipé des systèmes de signalisation embarqués KVB, TVM et ERTMS/ETCS (niveau 1 et 2), ainsi, que des systèmes de sécurité standards : RSO, DAAT, SAL et SAR.
Scénarisation

Le simulateur est totalement configurable. Les lignes sont éditables pour répondre à tous les cas de figure. La signalisation au sol est conforme aux standards français et regroupe la majeure partie des éléments de la signalisation mécanique, fixe et lumineuse. Une bibliothèque d’éléments de décors 3D permet d’étoffer les lignes et de faire évoluer le train dans différents milieux.
Le système de gestion des évènements permet de générer différents types de situation et d’aléas :
- Changement météorologique (dégagé, nuageux, pluvieux, neige, brume, brouillard)
- Évolution du scénario à diverses heures de la journée (jour et nuit sur 24h)
- Apparition d’objet 3D sur la voie (obstacles : rocher, voiture, piétons, animaux, arbre couché, etc.)
- Pannes de signaux
- Anomalies sur le convoi (train principal, train lièvre ou croiseur)
- Panne d’équipements bord
CONTACTS
Responsable scientifique | Mohamed Sallak
Tél : 03 44 23 49 30
Mail : mohamed.sallak@hds.utc.fr
Responsable technique | Yohan Bouvet
Tél : 03 44 23 79 93
Mail : yohan.bouvet@hds.utc.fr