
Véhicules intelligents
PACPUS : Perception et Assistance pour une Conduite Plus Sûre.
Présentation de la plateforme
La plateforme « Véhicules intelligents » est une plateforme de recherche technologique hébergée au sein de l’UMR Heudiasyc 7253 UTC/CNRS.
La plateforme offre principalement du soutien technique et scientifique sur les activités de perception multi-capteurs de l’environnement, de localisation sûre, précise et intègre, de navigation robotique, de contrôle commande et de communication V2X (V2V véhicule à véhicule ou V2I véhicule à infrastructure).
La plateforme Véhicules Intelligents se compose actuellement de 5 véhicules instrumentés (dont 2 sont autonomes), d’un banc d’essai VIL (Vehicle In the Loop), de logiciels de prototypage et de moyens d’essais (piste et infrastructure communicante).
La plateforme est financée par les tutelles d’Heudiasyc :
Cette plateforme est ou a été en support :
- de l’EQUIPEX+ Tirrex
- de l’EQUIPEX Robotex
- de projets du contrat de plan état région (Sysmia, RITMEA)
- de projets de recherche européens (Prometheus, Roadsense, CVIS, SAFESPOT, ESCAPE, ERASMO)
- de projets nationaux ANR ou du PREDIT (ARCOS, MobiVip, Sarin, V3EA, Anapolis)
- du programme CNRS ROBEA (Bodega)
- du GdR CNRS/INRETS CHMAC (Coopération Homme-Machine pour l’Aide à la Conduite automobile 1999–2001).
Véhicules

DYNA – Dynamique du véhicule
Missions
- Estimation d’état du véhicule par capteurs bas coût
- Prévention des situations critiques
- Prévention des pertes de contrôle
- Anticipation et analyse des défauts de la route
Environnement :
- Linux / ROS2
- Matlab / Simulink
Équipements :
Capteurs dynamométriques sur chaque roues
- Capteurs dynamométriques sur chaque roues
- Mesure du débattement des suspensions
- Mesure de la dérive
- Centrale inertielle de navigation haute performance

APAChE « véhicule Autonome Partenaire de Conduite » : flotte de ZOÉ robotisées
Les deux véhicules APAChE sont des équipements du projet ROBOTEX et sont entièrement contrôlables par ordinateur. La technologie embarquée permet aux unités de contrôle électroniques (ECU) du laboratoire de piloter la voiture par commande électronique. Un mode coopératif a notamment été développé pour transformer le véhicule en un partenaire de conduite qui veille activement à votre sécurité sur la route.
Missions
- Contrôle total longitudinal et latéral jusqu’à 50 km/h
- Conduite autonome jusqu’au niveau 5 SAE
- Collaboration entre le robot et l’humain
- Collaboration entre véhicules
Environnement
- Pilotage sous ROS2 ou Matlab / Simulink
- Actionnement en « drive-by-wire » sécurisé
Équipements
- LiDAR longue portée 40 nappes
- Caméras RGB calibrées et synchronisées 360°
- Centrale inertielle de navigation haute performance
- Synchronisation temporelle précise (~ 10 µs)
- Systèmes GNSS RTK multi-constellation GPS/Glonass/Beidou/Galileo
- Modems 4G et V2X
- Ordinateurs embarqués prêts pour le machine learning

ZOE bleue
Enregistrement de données dynamiques
Missions
Création de jeux de données pour :
- La perception
- La localisation
- La navigation
Environnement
- Linux / ROS2
Équipements
- LiDAR longue portée 40 nappes
- Caméras RGB calibrées et synchronisées 360°
- Caméras événementielles
- Caméras infrarouges
- Centrale inertielle de navigation haute performance
- Synchronisation temporelle précise (~ 10 µs)
- Systèmes GNSS RTK multi-constellation GPS/Glonass/Beidou/Galileo
- Modems 4G et V2X
- Ordinateurs embarqués prêts pour le machine learning

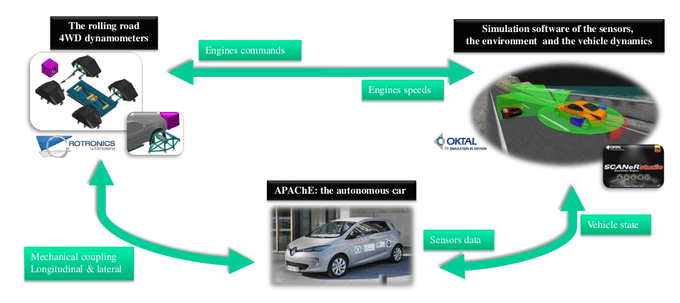
Banc VIL « Vehicle In the Loop » de simulation
Le banc d’essai « Vehicle In the Loop » pour la conduite autonome est une plateforme de 4 roues motrices destinée à tester des véhicules robotisés. Les 4 dynamomètres reproduisent les conditions de la route lors des phases d’accélération et de freinage du véhicule, tandis qu’un simulateur automobile fournit les données capteurs et la dynamique du véhicule aux algorithmes de contrôle
Missions
- Tests d’algorithmes de contrôle
- Sûreté de fonctionnement
- Simulation de situations critiques
- Interactions humain / robot
Environnement
- Simulateur SCANeR Studio avec visualisation 3D
- Simulateur dynamique CALLAS
- Sous Linux et Windows
Équipements
- Renault Fluence robotisée
- Restitution des efforts longitudinaux
- Restitution des efforts sur la direction
L’ensemble de l’architecture électronique du véhicule ainsi que les tâches robotiques sont testés en temps réel. Comme tous les signaux d’entrée des algorithmes de contrôle sont fournis dans des conditions équivalentes à la réalité, il est possible de diagnostiquer et d’améliorer aisément le comportement du robot avant de procéder à des essais sur piste.
CONTACTS
Responsable technique | Stéphane Bonnet
Tél : 03 44 23 52 56
Mail : stephane.bonnet@hds.utc.fr